Losoworozproszony laser światłowodowy,w oparciu o wzmocnienie Ramanaa potwierdzono, że jego widmo wyjściowe jest szerokie i stabilne w różnych warunkach środowiskowych, a pozycja widma laserowego i szerokość pasma półotwartej wnęki DFB-RFL jest taka sama, jak w przypadku dodanego urządzenia punktowego sprzężenia zwrotnego. Widma są bardzo współzależny. Jeśli charakterystyka spektralna zwierciadła punktowego (takiego jak FBG) zmieni się wraz ze środowiskiem zewnętrznym, zmieni się również widmo laserowe losowego lasera światłowodowego. W oparciu o tę zasadę losowe lasery światłowodowe mogą być wykorzystywane do realizacji funkcji wykrywania punktowego na bardzo duże odległości.
W pracach badawczych ogłoszonych w 2012 roku, poprzez źródło światła DFB-RFL i odbicie FBG, losowe światło laserowe może być generowane w światłowodzie o długości 100 km. Dzięki różnym projektom konstrukcyjnym można odpowiednio zrealizować wyjście lasera pierwszego i drugiego rzędu, jak pokazano na rysunku 15 (a). Dla struktury pierwszego rzędu,źródło pompyjest laserem 1365 nm, a czujnik FBG dopasowujący się do długości fali światła Stokesa pierwszego rzędu (1 455 nm) jest umieszczony na drugim końcu światłowodu. Struktura drugiego rzędu obejmuje punktowe zwierciadło FBG 1455 nm, które jest umieszczone po stronie pompy, aby ułatwić generowanie lasera, a czujnik FBG 1560 nm jest umieszczony na drugim końcu światłowodu. Wygenerowane światło laserowe jest wysyłane na koniec pompy, a pomiar temperatury można zrealizować poprzez pomiar zmiany długości fali emitowanego światła. Typową zależność między długością fali lasera a temperaturą FBG pokazano na rysunku 15(b).
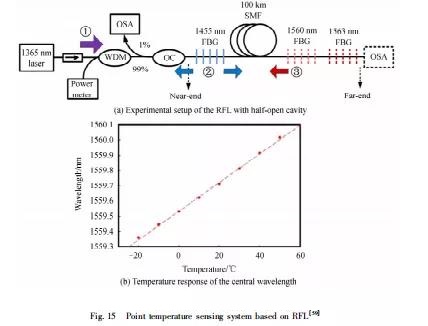
Powodem, dla którego ten schemat jest bardzo atrakcyjny w zastosowaniach praktycznych, jest: Po pierwsze, element pomiarowy jest urządzeniem czysto pasywnym i może znajdować się daleko od demodulatora (ponad 100 km), który jest używany w wielu ultra-długich środowiska aplikacji na odległość. (np. monitorowanie bezpieczeństwa linii energetycznych, rurociągów naftowych i gazowych, torów kolei dużych prędkości itp.) jest koniecznością; Ponadto mierzone informacje są odbijane w domenie długości fali, która jest określana tylko przez centralną długość fali czujnika FBG, dzięki czemu system w zasilaniu pompy lub światłowodzie Sensing może być ustabilizowany, gdy ulegną zmianie straty; wreszcie, stosunek sygnału do szumu w widmach laserowych pierwszego i drugiego rzędu wynosi odpowiednio 20 dB i 35 dB, co wskazuje, że graniczna odległość, jaką system może wykryć, znacznie przekracza 100 km. Dlatego dobra stabilność termiczna i wykrywanie na bardzo duże odległości sprawiają, że DFB-RFL jest wysokowydajnym systemem wykrywania światłowodów.
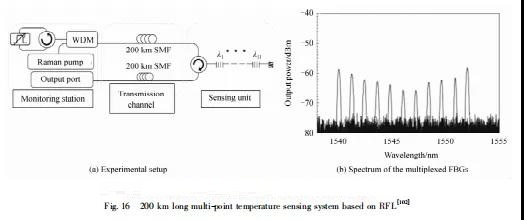
Zaimplementowano również punktowy system wykrywania o długości 200 km podobny do powyższej metody, co pokazano na rysunku 16. Wyniki badań wskazują, że ze względu na dużą odległość wykrywania systemu, stosunek sygnału do szumu odbitego sygnału czujnika jest W najlepszym przypadku 17 dB, w najgorszym 10 dB, a czułość temperaturowa to 11,3 pm/℃. System może realizować pomiary na wielu długościach fali, co daje możliwość pomiaru informacji o temperaturze w 11 punktach jednocześnie. I tę liczbę można zwiększyć. Jak wspomniano w literaturze, losowy laser światłowodowy oparty na 22 FBG może pracować przy 22 różnych długościach fal. Rozwiązanie wymaga jednak pary światłowodów o jednakowej długości, a zapotrzebowanie na zasoby światłowodowe jest podwojone w porównaniu z wyżej wymienioną metodą.
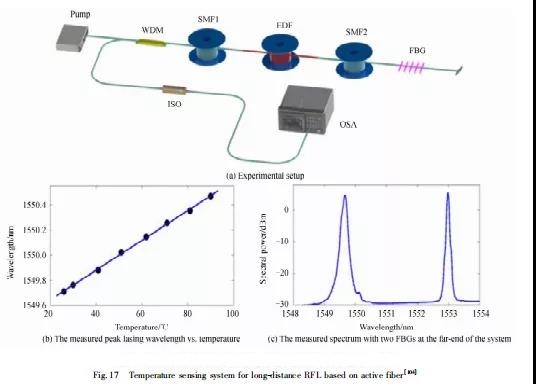
W 2016 r. ZdalnyOptyczny wzmacniacz pompujący, ROPA w komunikacji światłowodowej, wykorzystując mieszany zysk aktywnego wzmocnienia w aktywnym włóknie iRamanazysk w światłowodzie jednomodowym, kompleksowa analiza teoretyczna i weryfikacja eksperymentalna. Przedstawiono długodystansowy RFL oparty na aktywnym włóknie w paśmie 1,5 ¼m, jak pokazano na Rysunku 17(a). Ponadto losowy system laserowy sprawdza się również dobrze w wykrywaniu punktowym na duże odległości. Jako przykład weźmy punktowy czujnik temperatury. Szczytowa długość fali losowego końca wyjścia lasera tej struktury ma liniową zależność od temperatury dodanej do FBG, a system czujników ma funkcję multipleksowania z podziałem długości fali, jak pokazano na rysunku 17(b) i (c), jak pokazano. W szczególności, w porównaniu z poprzednią strukturą, ten schemat ma niższy próg i wyższy stosunek sygnału do szumu.
Oczekuje się, że w przyszłych badaniach, dzięki zaprojektowaniu różnych metod pompowania i luster, powstanie system losowego wykrywania punktów lasera światłowodowego o bardzo dużej odległości, charakteryzujący się doskonałą wydajnością.
Prawa autorskie @ 2020 Shenzhen Box Optronics Technology Co., Ltd. - Chiny Moduły światłowodowe, producenci laserów ze sprzężeniem światłowodowym, dostawcy komponentów laserowych Wszelkie prawa zastrzeżone.